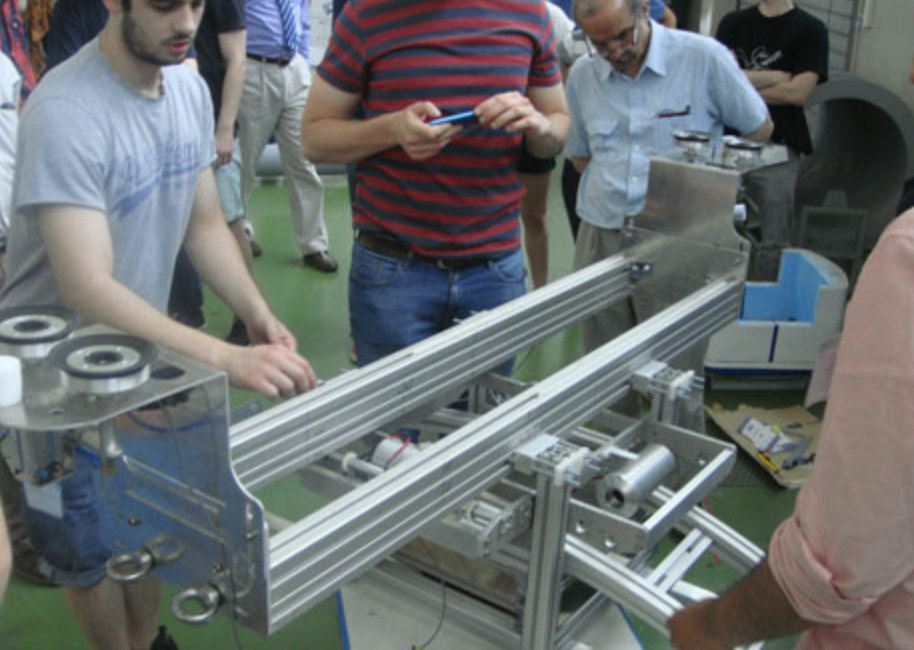
Za projekt EGPR 2015., postavljen je izazovan zadatak konstruiranja daljinski upravljane ronilice za inspekciju reaktorske posude pod tlakom u nuklearnim elektranama. Tjekom projekta, istraženi su različiti aspekti problema, uključujući podvodni pogon, određivanje točne lokacija i značajki spremnika koji se ispituje, nerazorne metode ispitivanja i postupke skeniranjai prijenosa podataka, kao i kontrole nad ronilicom. NA završnoj radionici, izrađen je prototip najboljeg rješenja koji je nakon toga testiran.